

分野4レポート 乱流の直接計算に基づく次世代流体設計システムの研究開発について

坪倉 誠
Makoto Tsubokura
分野4自動車プロジェクト担当
神戸大学大学院教授
理研計算科学研究機構
複雑現象統一的解法研究チーム
チームリーダー
分野4の概要
分野4では、21世紀のものづくりを抜本的に変革するような計算科学技術を戦略的に推進することを目標としています。東京大学生産技術研究所、宇宙航空研究開発機構および日本原子力研究開発機構が戦略機関となり、三十を超える大学や研究所を連携研究機関として、総勢三百名弱の研究者が分野4の研究開発に参加しています。 東京大学生産技術研究所教授、革新的シミュレーション研究センター長である加藤先生が分野4の統括責任者として「次世代ものづくり」をキーワードに研究開発を進めてきました。分野4の特徴として産業界からも積極的な参加を頂いています。
分野4のプロジェクトとしては三つあります。まずプロダクト・イノベーション。製品の性能を飛躍的に向上させるような要素技術の研究開発です。二つ目はプロセス・イノベーション。ものづくりのプロセス自体に変革をもたらすシミュレーション技術の研究開発です。そして三つ目が大型設備の安全・安心を大幅に向上させる評価システムの研究開発です。私は、プロセス・イノベーションの課題のひとつである「乱流の直接計算に基づく次世代流体設計システムの研究開発」に、連携機関のひとつである北海道大学の一員として参加してきました。昨年、神戸大学大学院に移りましたが、引き続き自動車プロジェクトを担当しています。
自動車プロジェクトのねらい
「京」コンピュータは自動車会社の汎用スパコンの千倍の速い性能を持っています。そんな「京」を使って何ができるのか?いままでとは違う次世代の空力シミュレーションによって次の二つをねらいとします。
- 超高解像度渦シミュレーション
風洞実験の代替ができるような高精度空力シミュレーションを実現する。 - リアルワールド・シミュレーション
風洞実験では再現が難しい様々な走行状態での走行安全性、操縦安定性の評価がシミュレーションでできるようにする。
基礎科学分野の計算資源の効率的な運用、人材育成、研究ネットワークの構築、分野を超えた連携などを進め、次の様な計算科学技術推進体制を構築してきました。
これまでのスパコンの開発の歴史と自動車業界における空力シミュレーションの適用の歴史をみてみますと、10年の時間的ギャップがあります。例えば、 2002年に40テラフロップス級の地球シミュレータが誕生したのですが、地球シミュレータの登場によって私達は時空間が変動する流れ場のシミュレーションを行えるようになりました。その頃、産業界では時間平均の空力シミュレーションが一般的でした。それから10年経過した2012年頃には、数10テラフロップス級のシステムが自動車業界に導入可能となり、それを使って時空間変動のシミュレーションを各社で行うようになりました。
2010年に登場した10ペタフロップス級の「京」と同等の性能を持つスパコンは2020年には自動車業界各社で稼働していると考えられます。現在「京」でしか実現できない事が、2020年代には各社のCAE環境で実現出来るのです。「京」を利用することにより、10年後のシミュレーションの姿を今先取りすることができるのです。各社で長期戦略や将来計画を作成する際に、シミュレーション技術に関する具体的な見通しを持って検討できるようになります。それが日本企業の国際競争力の強化に繋がります。そういった事を通して産業界に貢献したいと、私達は考えています。
2012年には自動車メーカー10社、サプライヤー4社そして七つの研究機関から構成される自動車コンソーシアムを設立いたしました。 このコンソーシアムでは、「HPCによる自動車用次世代空力・熱設計システムの研究開発」というテーマの基に、自動車業界から計算科学技術に対するニーズを伺い、その中から課題を選定し研究開発を行ってきました。産業界からは研究開発に必要な様々な実験データや車体モデルの提供を受けるだけでなく、産業界の研究者・技術者にも実際に「京」を使って計算してもらいました。
風洞実験の代替ができるシミュレーション高精度化や風洞実験では難しいリアルワールドでの走行安全性、操縦安定性の評価など、自動車プロジェクトでのこれまでの成果のいくつかをご紹介します。
超高解像度渦シミュレーション
現在産業界で使用されている車体モデルは、数ミリ~数センチの解像度でエンジンルームや床下形状を含む車体形状をモデル化したものです。メッシュサイズでは数千万要素から一億要素になります。超高解像度渦シミュレーションでは、数十億要素から百億要素の大規模モデルで計算することが前提になります。0.5ミリから数ミリの解像度になります。百億規模の格子を切るソフトウェアがまだ世の中に存在しないので、自動的に格子を細かくするソフトを開発しました。その格子自動細分化機能をプリ処理に組み込んだ超高解像度渦シミュレーション・ソフトウェアFrontFlow/red-HPCを「京」上に提供しました。百億要素というのは「京」のメモリ限界であって、格子細分化の制約ではありません。その結果次の様なステップで様々な超高解像度渦シミュレーション行えるようになりました。
- ユーザーは自分の汎用CAE環境で、数千万要素のモデルを作成し、流れ場を発達させて計算結果を得る。(図1)
- モデルと計算結果を「京」に移す。
- 「京」上でプリ処理を実行させ、自動領域分割と格子細分化を行い、数十億から百億要素の大規模モデルの格子を自動作成させる。さらに数千万要素で得た計算結果をマッピング処理して大規模モデルの初期値として活用する。
- 大規模モデルの超高解像度渦シミュレーションを「京」で実行する。(図2)
- 計算後はポスト処理で大規模モデルの計算結果を数千万要素モデルへマッピングする。
- ユーザーはマッピングされた計算結果を自分の汎用CAE環境へ移し、数千万要素モデル上で大規模モデルの計算結果を可視化する。(図3)
大規模モデルの計算結果を数千万要素モデルへマッピングすることによって、大規模モデルの計算結果が失われるのではないか?とよく質問されるのですが、数千万要素モデルにおいても渦構造ひとつは、複数の要素で表現されますので問題になりません。

図1 数千万要素モデルでの計算結果
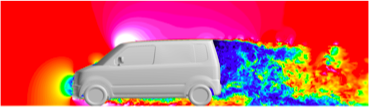
図2 大規模モデルの計算結果
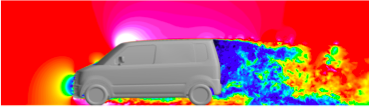
図3 数千万要素モデル上にマッピングされた大規模モデルの計算結果
このフレームワークを用いて、これまで産業界に蓄積されてきた数千万要素モデルのデータを用いて、数多く超高解像度渦シミュレーションを実行することができました。さらにそれらの計算結果を従来のシミュレーション結果や風洞実験データと比較する事が可能となったのです。
その結果、超高解像度渦シミュレーションによる解析結果は、風洞実験値に対して1〜2%の誤差であることが確認できました。さらに定性的な空気抵抗変化も捉えられる計算安定性が確認でき、超高解像度渦シミュレーションが風洞代替の効果を持つことが実証されました。
超高解像度渦シミュレーションは別の効果ももたらしました。車体の床下に突起物を付けると空気抵抗が下がることは経験的にわかっていましたが、その理由は不明でした。 高精度なシミュレーションにより、風洞では観察が難しかったある渦が他の渦に影響を与えている様子や、渦と車体との関係が三次元的に観察できるようになりました。その結果突起物の直接影響から間接影響までが把握できるようになり、空気抵抗が下がった理由が判明しました。
何故そうなるのか?どうすればそうなるのか?理屈がわかるようになる!高精度なシミュレーションにより、より性能の高い車の開発が可能になります。
風洞実験評価
風洞実験値に対して1〜2%の誤差でシミュレーションができるような世界になりますと、風洞実験自体の誤算も問題になってきます。風洞の床や壁が実験にどんな影響を与えているのか?車の重さでタイヤが変形して膨らむだけで、空気抵抗が最大3〜4%も変わる事もあるのです。サスペンションの自重・揚力による形状変化によっても空気抵抗は変わります。こういった影響まで考慮する必要がでて来たわけです。
そこで、実際に存在する自動車風洞設備の設計データを自動車会社から提供してもらい、「京」上にデジタル自動車風洞を構築しました。ムービングベルトを装備した最新型の実車風洞を60億の非構造メッシュでモデル化しました。タイヤ変形形状のデータの提供も受けて、時速160kmのテスト走行の車体姿勢を考慮した上で、壁の影響や床の影響を含めたシミュレーションを行いました。その結果と、壁を取り除いた広い空間でのシミュレーション結果とを比較すれば、風洞実験の計測精度がどの程度なのかが判ります。風洞実験自体を評価しようという試みです。
風洞実験の評価はまだ途中段階ですが、2〜3%の誤差要因がありそうです。現在その解析を進めているところです。
リアルワールド・シミュレーション
風洞の中でできる実験とリアルワールドで発生する現象との間には当然大きなギャップがあります。リアルワールドでは、突風を含む変動風が吹いています。路面も滑らかとは限らずに、バンプや凸凹があります。そして人間が車を操縦しています。追い越し、追い越され、すれ違いなど様々な状況が発生しています。
風洞で変動風を発生させたり、模型を使って車体運動を模擬したり、巨大水槽内で模型を蛇行させたり、世界各地では様々な実験が研究レベルで行われています。しかし、それらを実際の車の設計開発に適用するまでには至っていないのが現状です。
それなら、風洞での実験が難しい実際の走行状態を、リアルワールド・シミュレーションとしてデジタルに再現しましょう、というのが私たちの立場です。実走行状態における気流・車両運動連成空力解析により操縦安定性・走行安全性に関する非定常空力評価ができるようになりました。具体的に、次の様な研究成果が出てきています。
- レーンチェンジ時の操縦安定性
車体の床にパーツを付加するとレーンチェンジの時に車体がより安定するというテスト・ドライバーの証言があったのですが、その理由は不明でした。まずレーンチェンジ運動を再現させ、その運動と空力との連成計算を、パーツのある場合、ない場合について行い、車にかかる空気の力がどの程違うかを調べました。その結果、レーンチェンジ時に起こる車のロール運動に対して、パーツがある場合はその運動を抑える力が発生している事がシミュレーションで判明しました。 - 蛇行運動の高速走行安定性
空力チューニングを施した車体とそれを施していない車体とをテスト・ドライバーが実際に蛇行運転をして比較すると、前者の方が安定して蛇行できると言っています。そこで二つの車で蛇行運転時の空気の流れがどう違うのかを調べました。その結果、空力チューニングを施した車体の方が明らかに渦の発生が少なく、車が空気から受ける力がずいぶん違う事が判ってきました。 - ドライバーの反応を含めた横風時の走行安全性
急に横風を受けると車が風であおられて少し横流れします。ドライバーは慌ててハンドルを操作して横流れを止めようとします。空力改善したモデルとオリジナルのモデルでどれくらい車の挙動が変わるのか、横風と車体運動の連成シミュレーションにより改善度を確認することができました。しかもその時に、ドライバーがハンドルを操作した操舵量が小さくなっている事も判りました。
これまでテスト・ドライバーが実験車で経験した感覚や、試作車に搭載した計測器でしか収集できなかったデータが、リアルワールド・シミュレーションにより得られるようになりました。デジタル・オンロード・テストが実現しつつあるのです。
今、世の中で車の自動運転技術の話が話題になっていますが、こういったリアルワールドでの車体運動の解析技術が自動運転技術の開発には欠かせないと考えています。
車室内騒音の定量予測
これは加藤先生が開発したFrontFlow/blueを用いて、車の室内で運転手や助手席に座っている人がどんな音を感じるのか、シミュレーションで予測する試みです。
車が走っている状態を空力シミュレーションで再現し、まず車の周りの渦構造を解きます。渦構造が判れば車体の表面の圧力が判ります。その圧力の時間変化を境界条件として構造解析を行いボディの振動を解析します。その振動が伝わってキャビン内の空気を振動させて騒音となります。
この一連の動きを同時に解析する、流体・振動・騒音連成解析システムを構築し、車室内の騒音予測が行える事を実証しました。実車がなくとも音に関する乗り心地が予測できるのです。流体・振動・騒音の三連成問題の解析例は世界で初めての成果だと思います。
ポスト京に向けて
HPCI戦略プログラムは今年度で終了します。 ポスト京に向けては、既に「近未来型ものづくりを先導する革新的設計・製造プロセスの開発」という重点課題テーマで、加藤先生を責任者として研究開発が継続されることが決まっています。 構造解析を含め、リアルタイム、リアルワールドの自動車統合設計プロセスを指向する予定です。現在、10数日かかっている格子モデルの作成からシミュレーション、可視化までを半日で行うのが目標です。
自動車コンソーシアムも来年度まで継続され、これまでの成果を踏まえた実用化の推進、ポスト「京」に向けた体制作りを進める予定です。
(構成:杉原正一)
